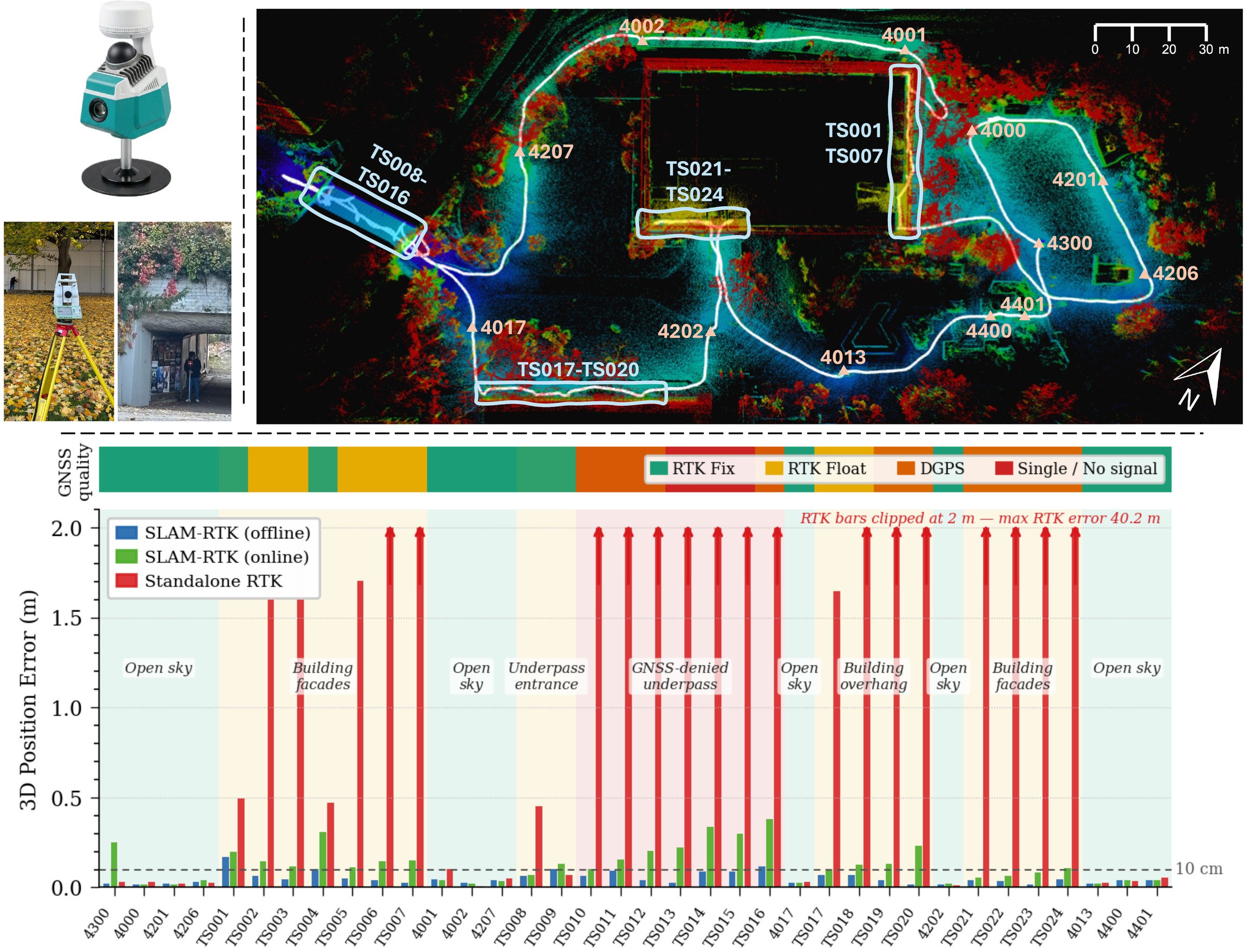
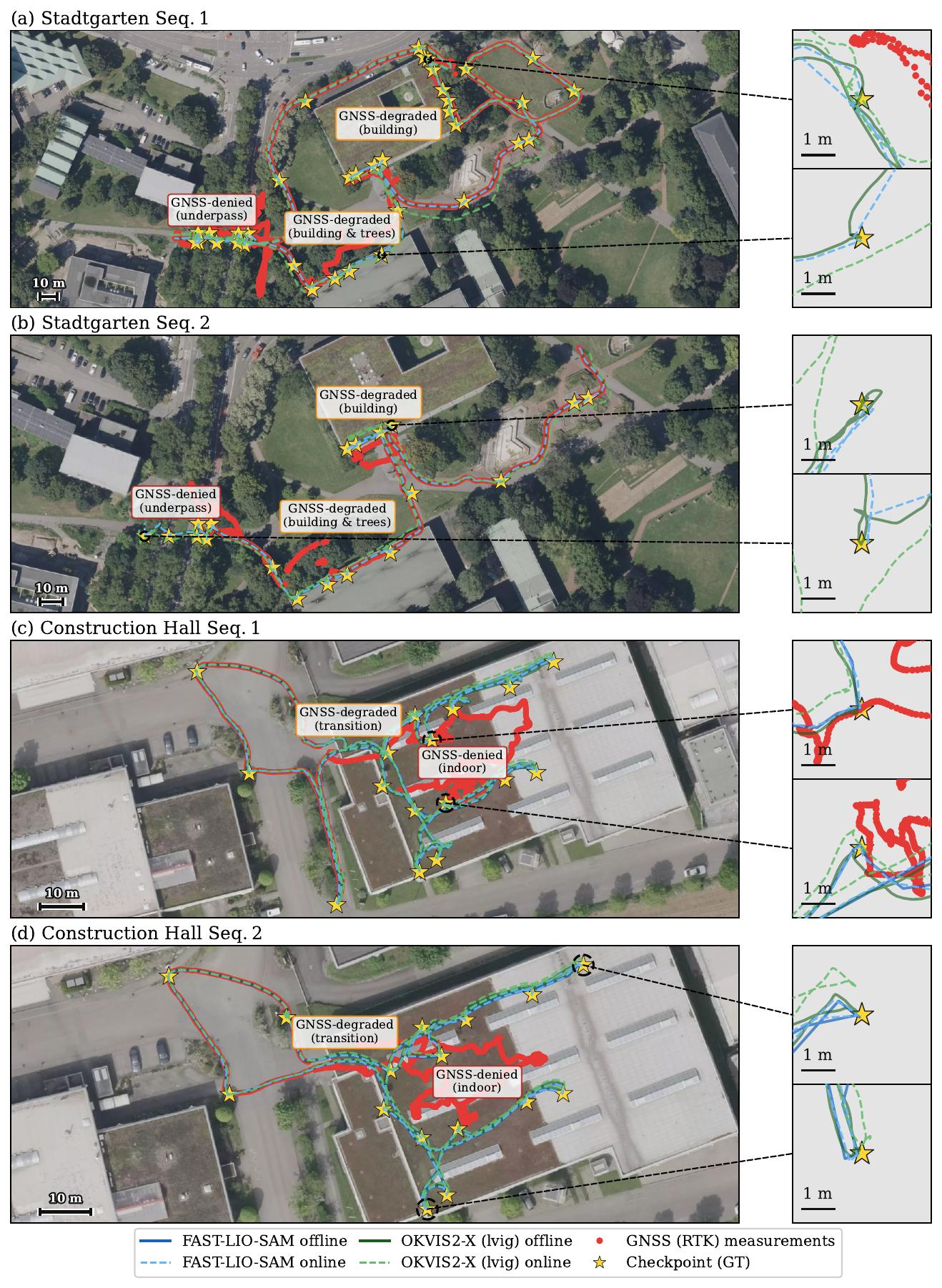
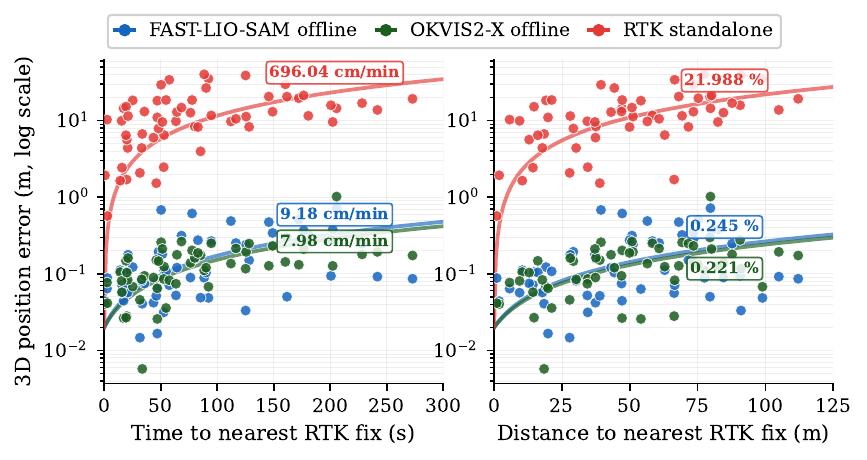
RTK-SLAM systems integrate simultaneous localization and mapping (SLAM) with real-time kinematic (RTK) GNSS positioning, promising both relative consistency and globally referenced coordinates for efficient georeferenced surveying. A critical and underappreciated issue is that the standard evaluation metric, Absolute Trajectory Error (ATE), first fits an optimal rigid-body transformation between the estimated trajectory and reference before computing errors. This so-called SE(3) alignment absorbs global drift and systematic errors, making trajectories appear more accurate than they are in practice, and is unsuitable for evaluating the global accuracy of RTK-SLAM. We present a geodetically referenced dataset and evaluation methodology that expose this gap. A key design principle is that the RTK receiver is used solely as a system input, while ground truth is established independently via a geodetic total station — a separation absent from all existing benchmarks. The dataset covers two outdoor-to-indoor scenes with synchronized LiDAR, camera, IMU, and RTK inputs. We evaluate LiDAR-inertial, visual-inertial, and LiDAR-visual-inertial RTK-SLAM systems alongside standalone RTK, reporting direct global accuracy and SE(3)-aligned relative accuracy to make the gap explicit. Results show that SE(3) alignment can underestimate absolute positioning error by up to 76%. RTK-SLAM achieves centimeter-level absolute accuracy in open-sky conditions and maintains decimeter-level global accuracy indoors, where standalone RTK degrades to tens of meters.